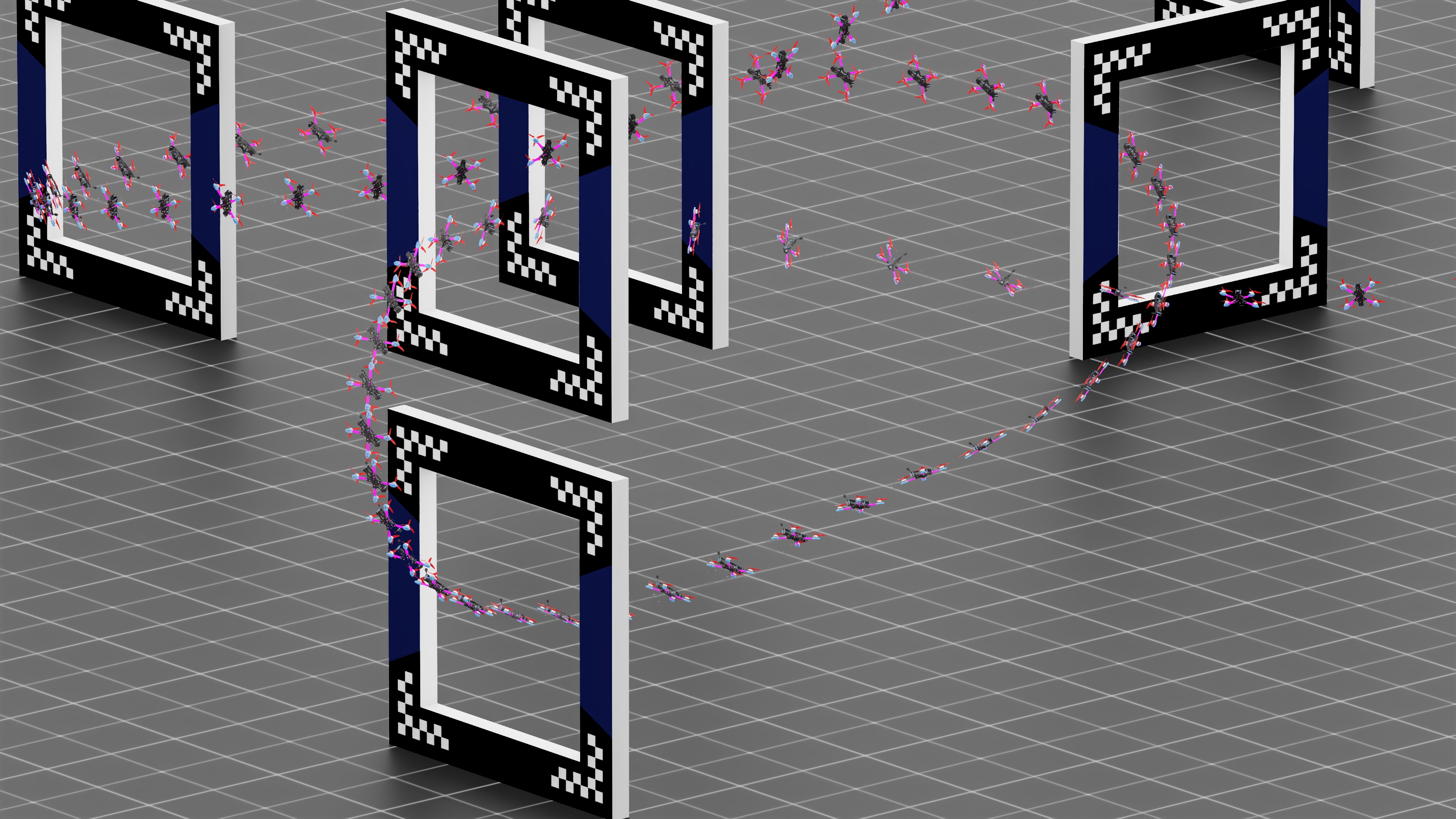
Isaac Drone Racer
Skills: RL, IsaacLab, Isaac Sim, Aerial Robotics
Developed a reinforcement learning framework for high speed autonomous drone racing, built on top of IsaacLab, with a focus on accurate physics and modular design.
Skills: RL, IsaacLab, Isaac Sim, Aerial Robotics
Developed a reinforcement learning framework for high speed autonomous drone racing, built on top of IsaacLab, with a focus on accurate physics and modular design.

Skills: RL, IsaacGym, Aerial Robotics
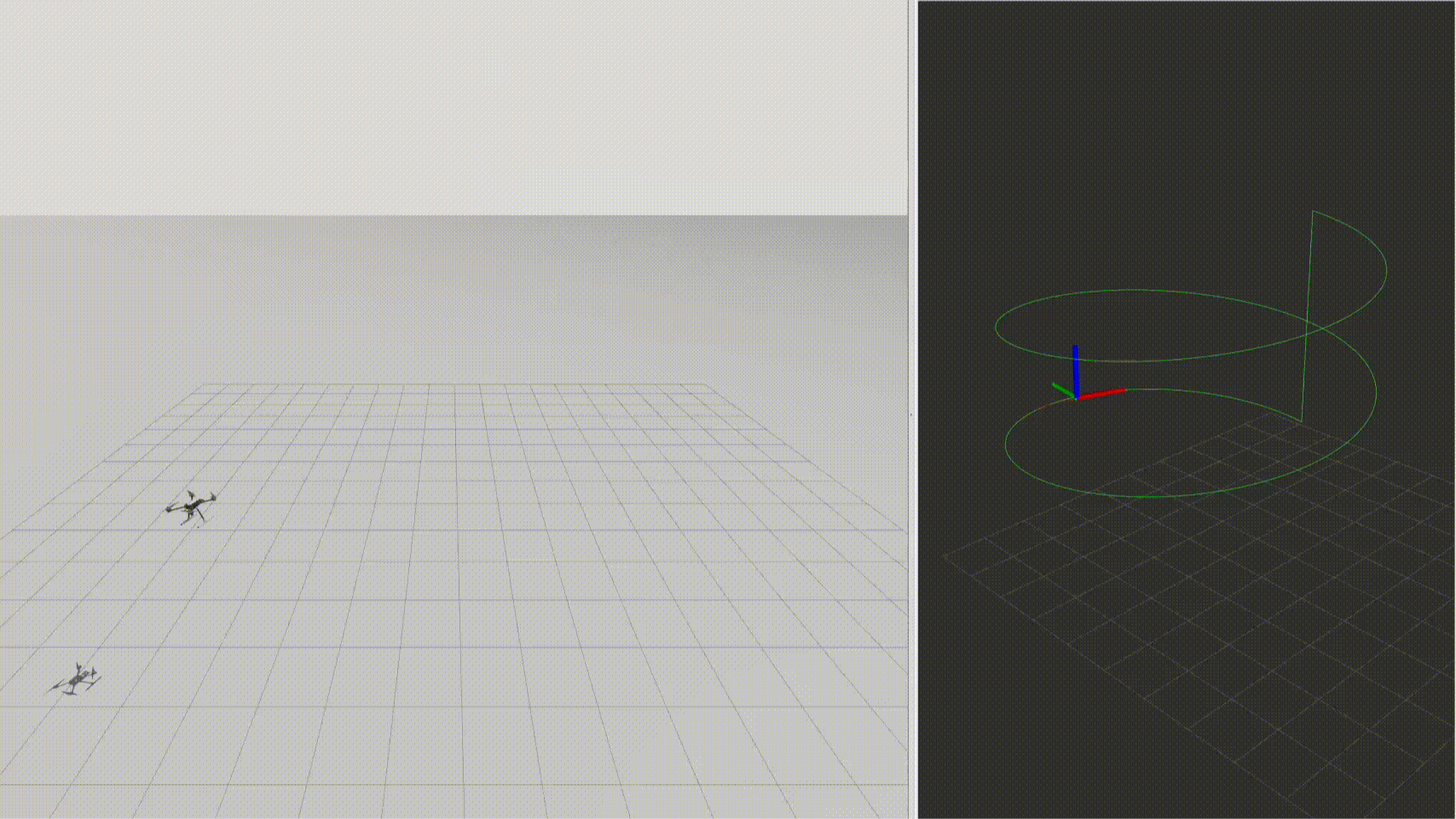
Developed an RL-based control system for drones that uses predictive cues to proactively counteract disturbances. - ICUAS 2025
Skills: ACADOS, Casadi, PX4, ROS2
Built a ROS2 package for nonlinear model predictive control (NMPC) based trajectory tracking for PX4 based drones
Skills: Nav2, ROS2, AGV Swarm, Task Scheduling
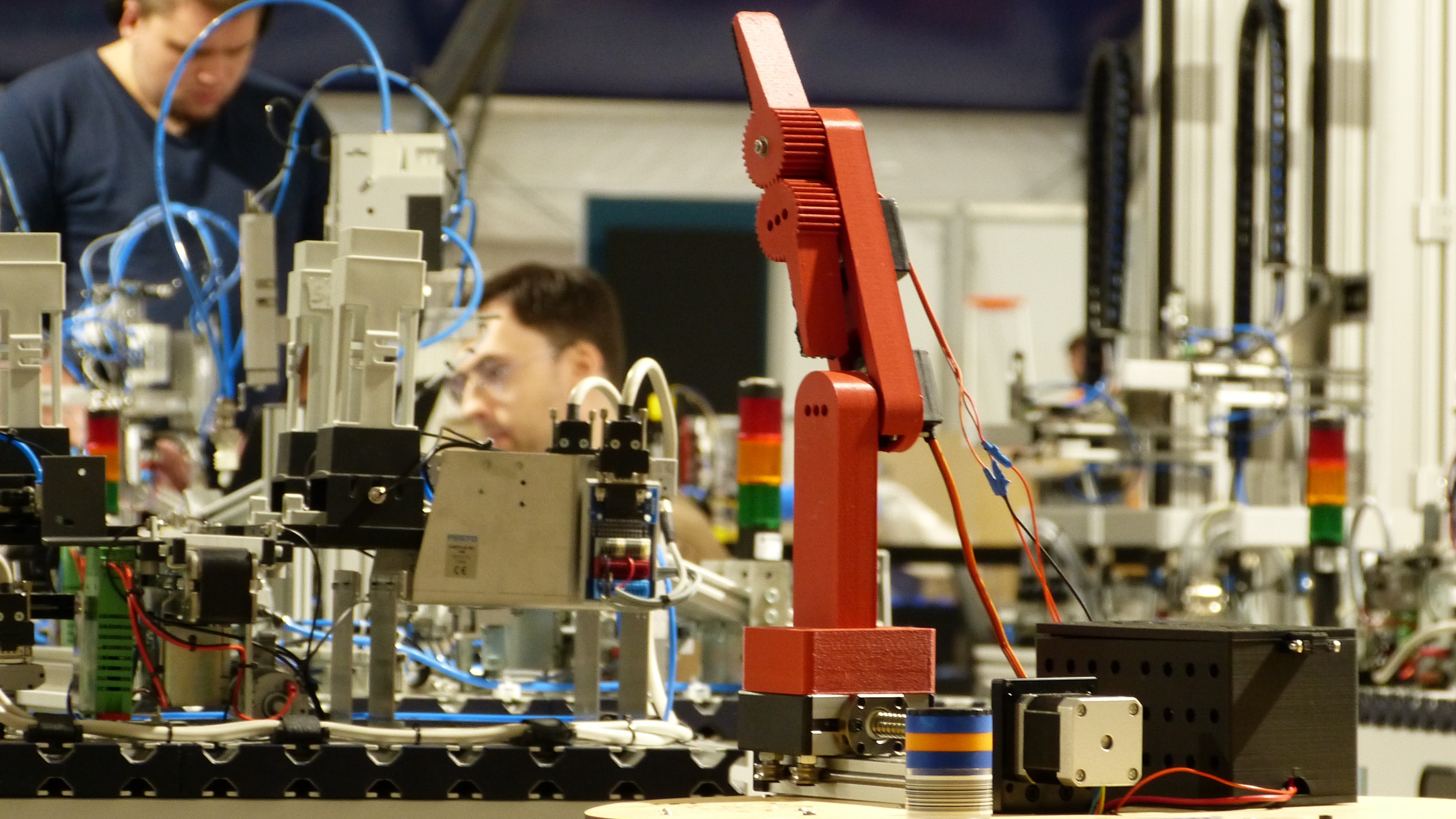
Developed a Collaborative AGV Swarm controlled by a centralised task scheduler to execute product orders in a smart factory setting - Robocup 2024

Skills: Aerial vehicles, mobile robots, ROS, C++
Developed an aerial ground robotic system consisting of a drone and a mobile robot for autonomous navigation in challenging terrain
Skills: Quadruped Locomotion, ROS, Reinforcement Learning
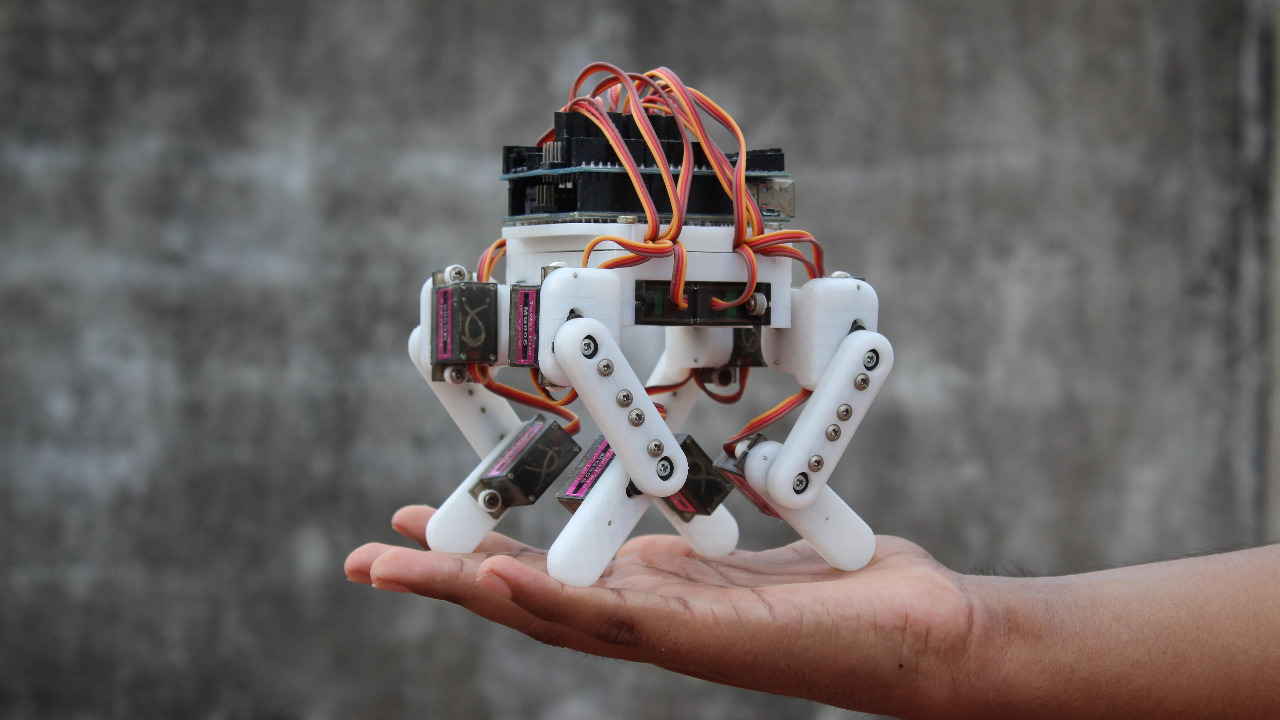
Built an RL algorithm to learn a morphology agnostic quadrupedal locomotion in simulation to generalise to any quadrupedal robot configuration
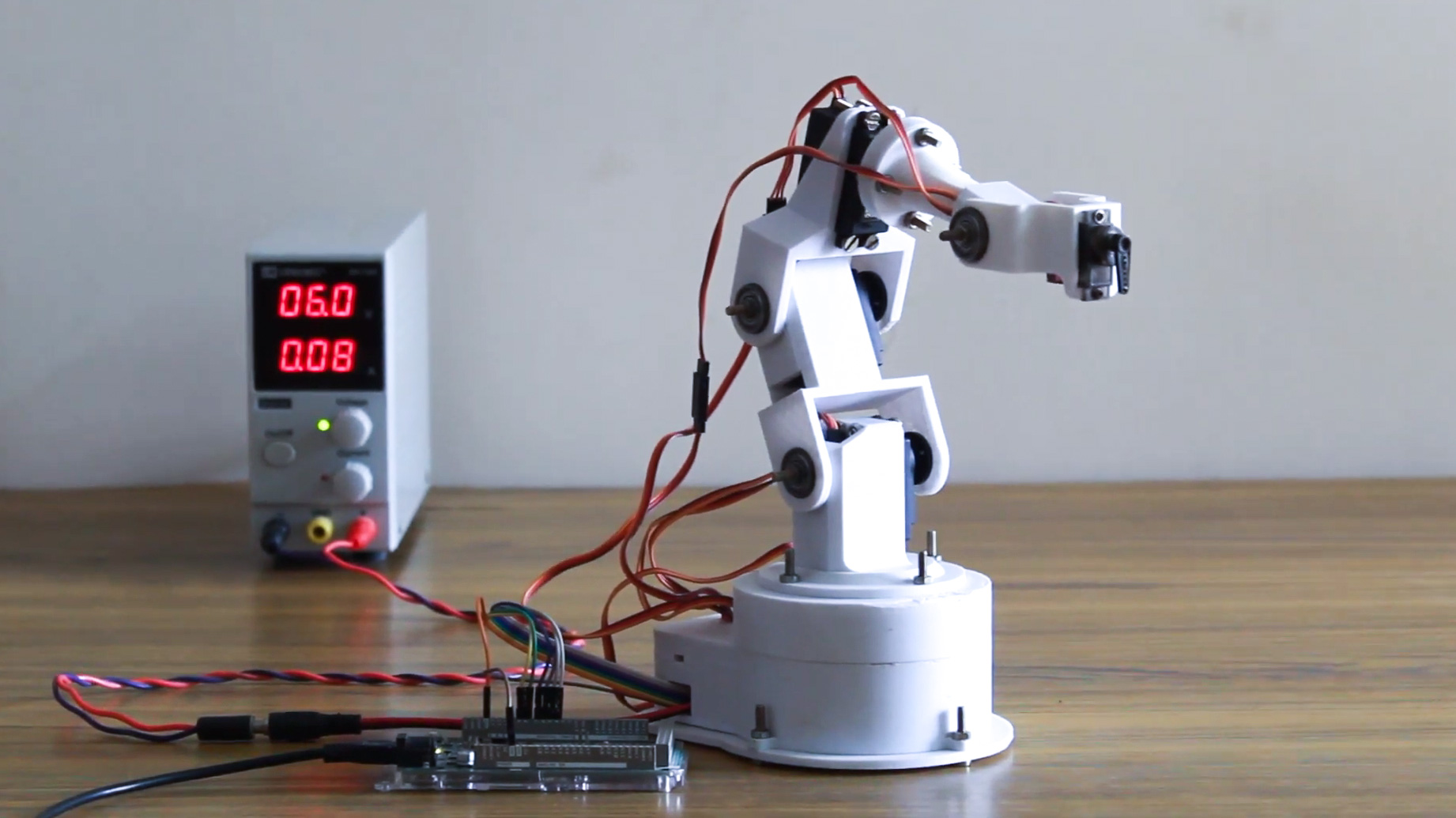
Skills: Kinematics, Dynamics, Arduino
Developed an open source kinematics library for Arduino based microcontrollers featuring transformation matrix manipulation, Jacobian computation and forward and inverse kinematics using Newton Raphson method
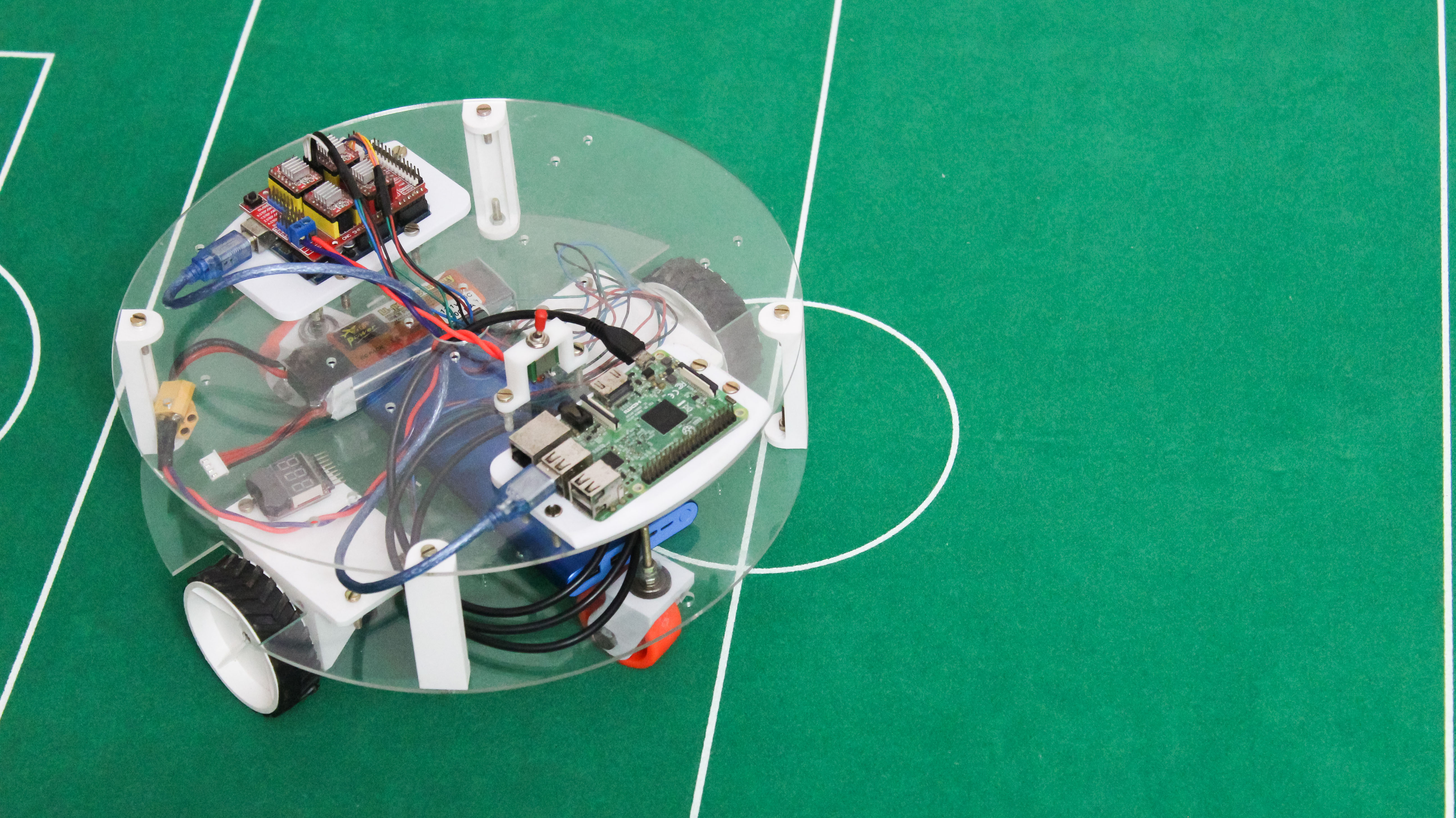
Skills: Mobile Robot Kinematics, Bezier Interpolation, Arduino
Designed a trajectory following controller which tracks waypoints and global yaw and tested the pipeline on a scratch-built differential drive robot

Skills: Reinforcement Learning, Pytorch, Python
Developed a toolbox with highly optimized implementations of deep reinforcement learning algorithms for robotics using Pytorch and Python3
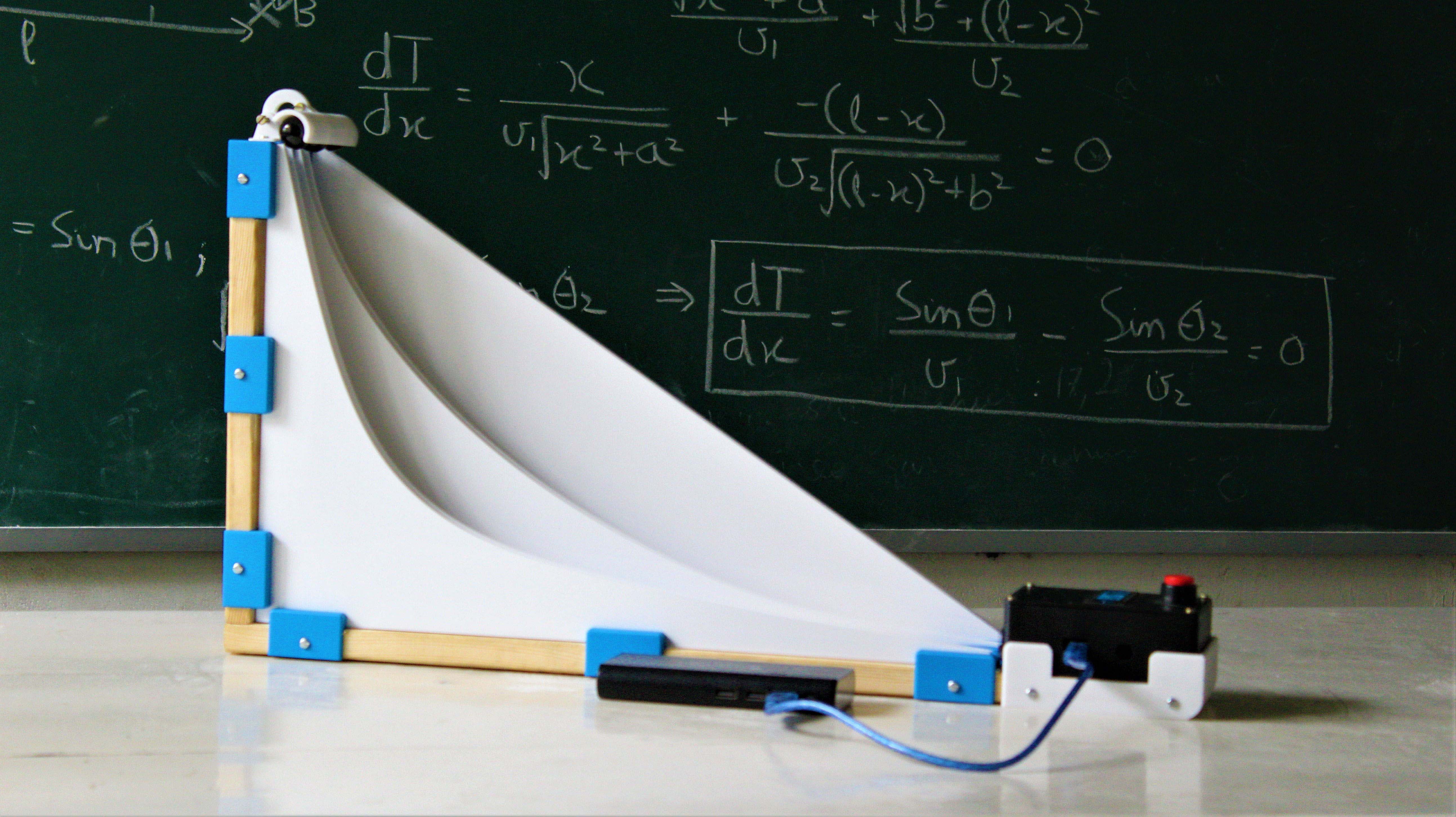
Skills: Fusion360, Digital Fabrication, Calculus of Variations, Arduino
Developed an apparatus to visually demonstrate the phenomena of fastest descent which can be used in physics or math classes for younger students
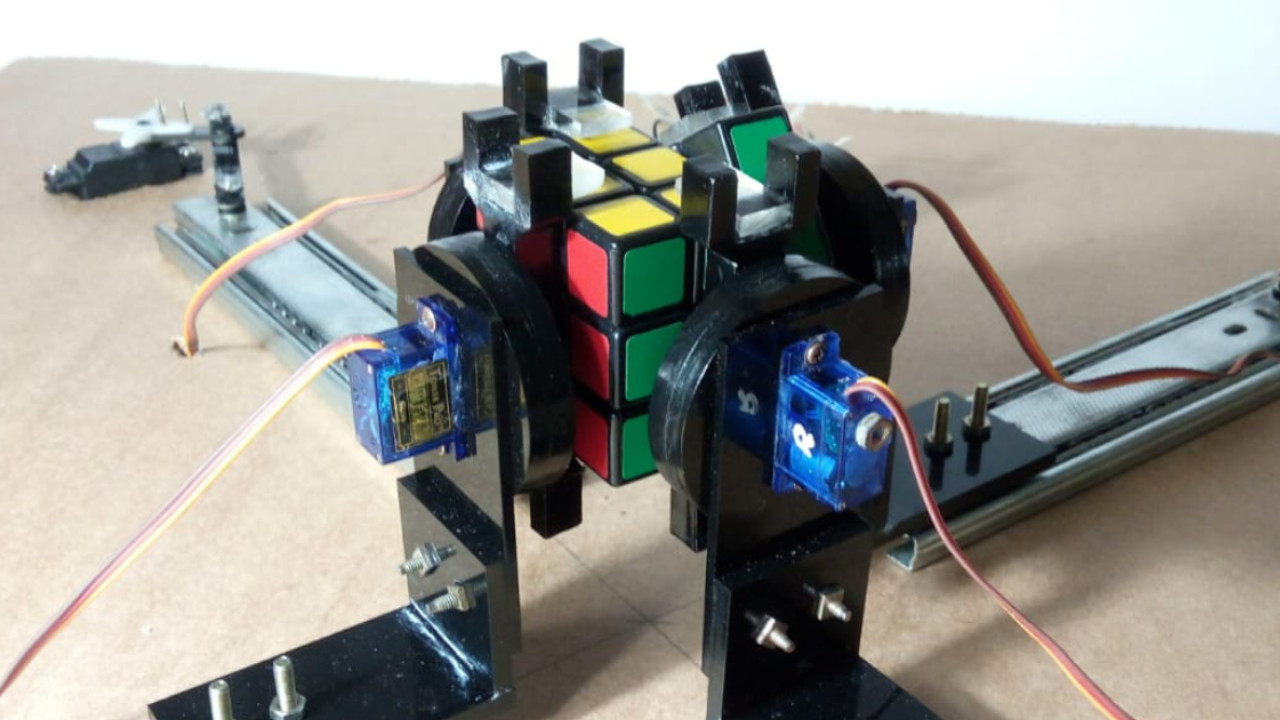
Skills: Algorithms, PyQt5, Arduino
Designed and built a Rubik's Cube Solver featuring the God's algorithm solution, vision based color detection and 4 independent arms consisting of 2 actuators each to manipulate the cube.

Skills: Fusion360, Digital Fabrication, Woodworking, Arduino
Designed and built an air hockey table from scratch using CAD and CAM tools at a low cost. This design features an Arduino based point tracking system and RGB lights

Skills: Fusion360, Digital Fabrication
Designed and built a structurally stable longboard deck using cardboard and no adhesives. The design consists of an iso-grid built with cardboard pieces that were lasercut
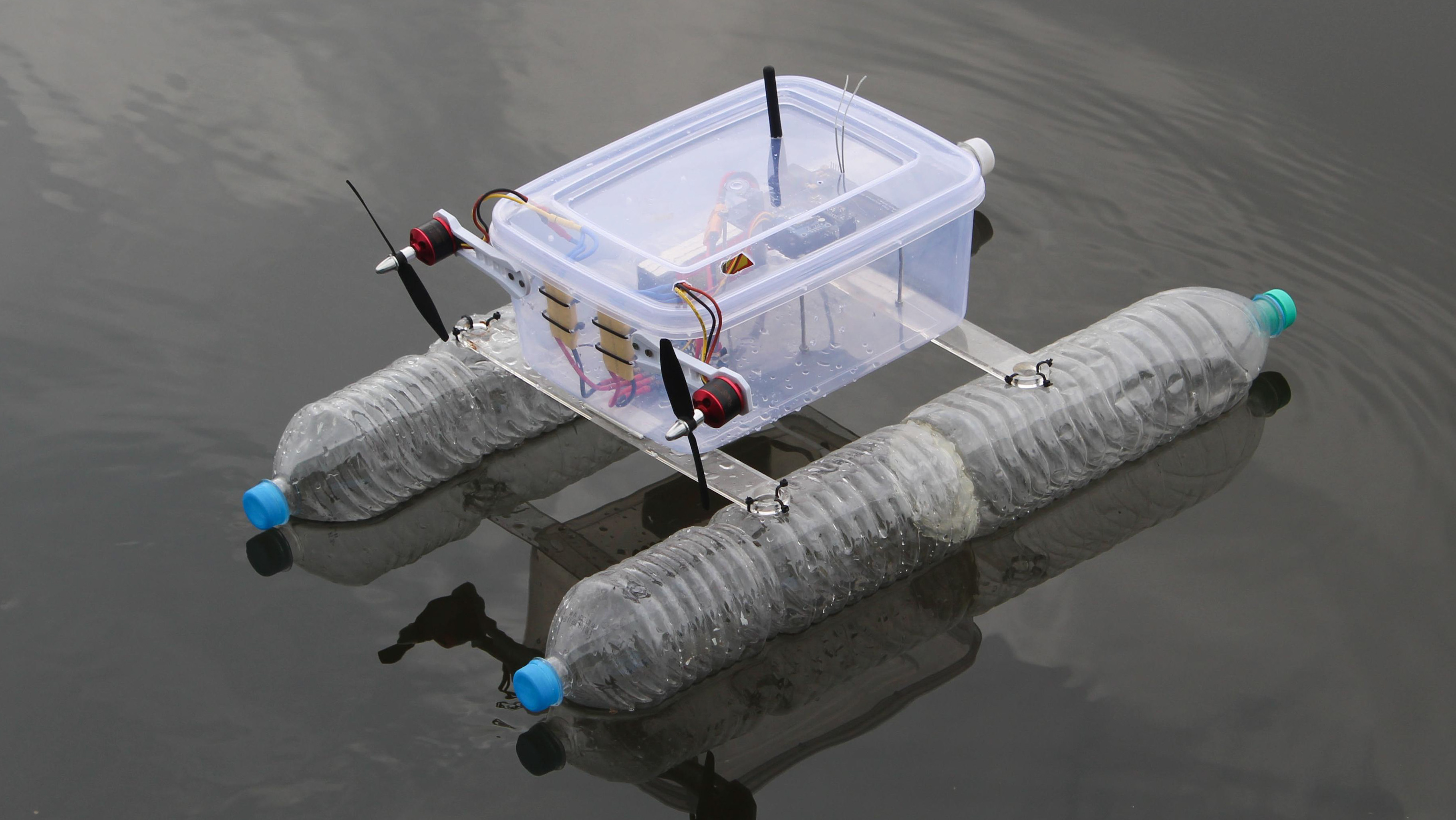
Skills: PID Control, Waypoint Tracking, GPS, Arduino
Developed a waypoint tracking controller for an autonomous surface vehicle and tested the pipeline on a scratch-built catamaran style boat
Skills: Object Oriented Programming, Numerical Differentiation
Developed a toolkit from scratch for building and training deep learning models. The results are comparable to widely used machine learning toolkits like Pytorch
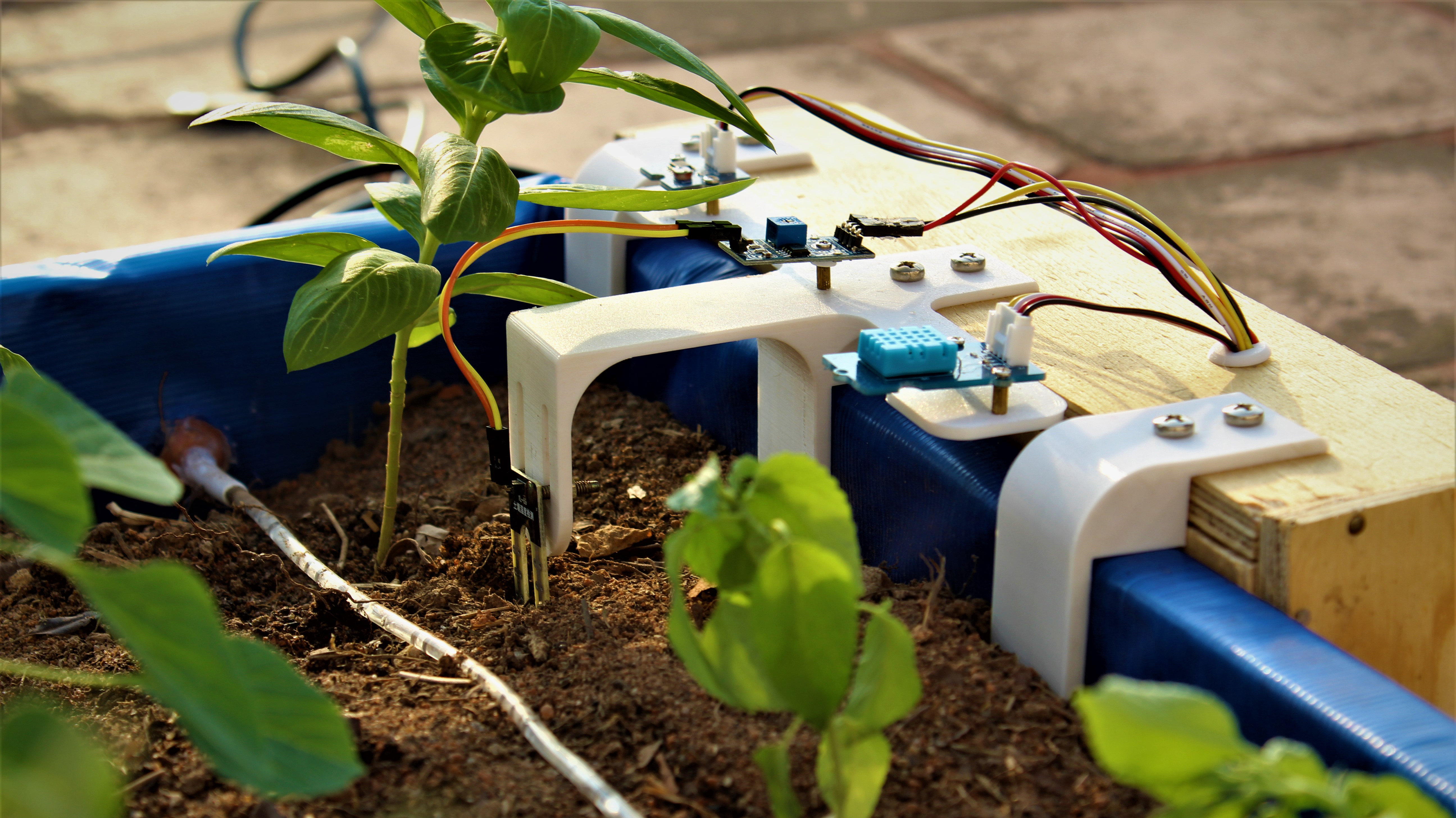
Skills: IOT, Sensors, Firebase
Built an IOT powered garden that can monitor the health of the plants, transmit realtime data over the cloud and automatically water the plants when required
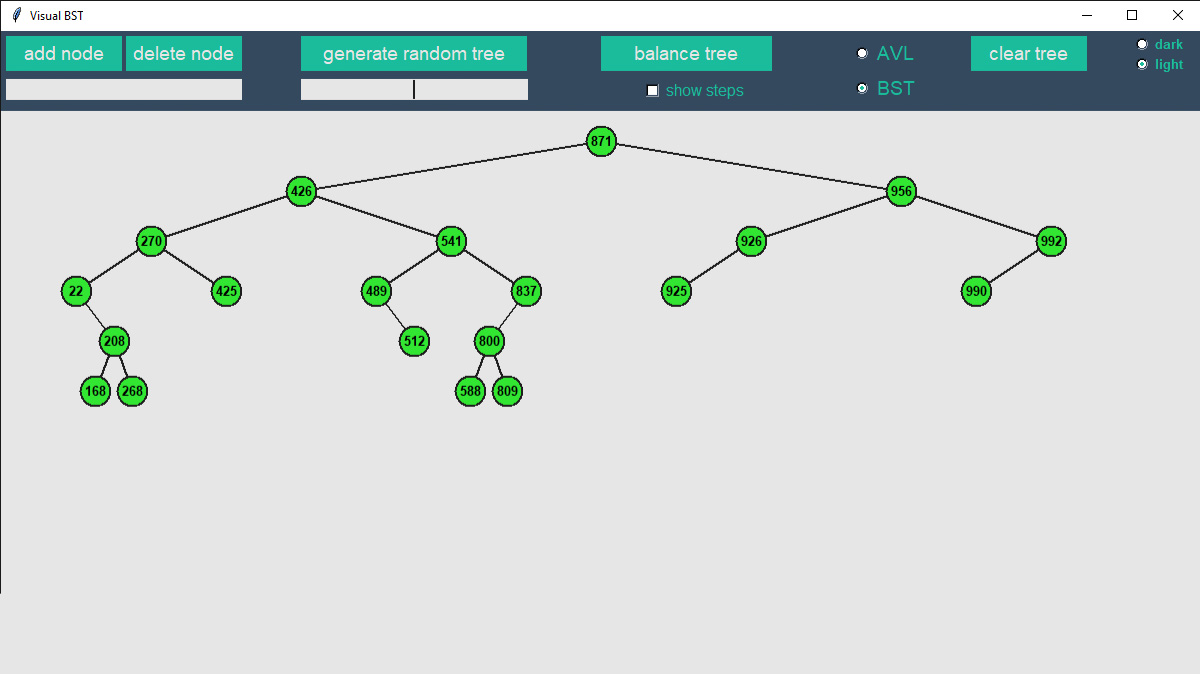
Skills: Python, Algorithms
Developed a visualization for binary search trees using tkinter and python. Features include adding nodes, deleting nodes and balancing the tree
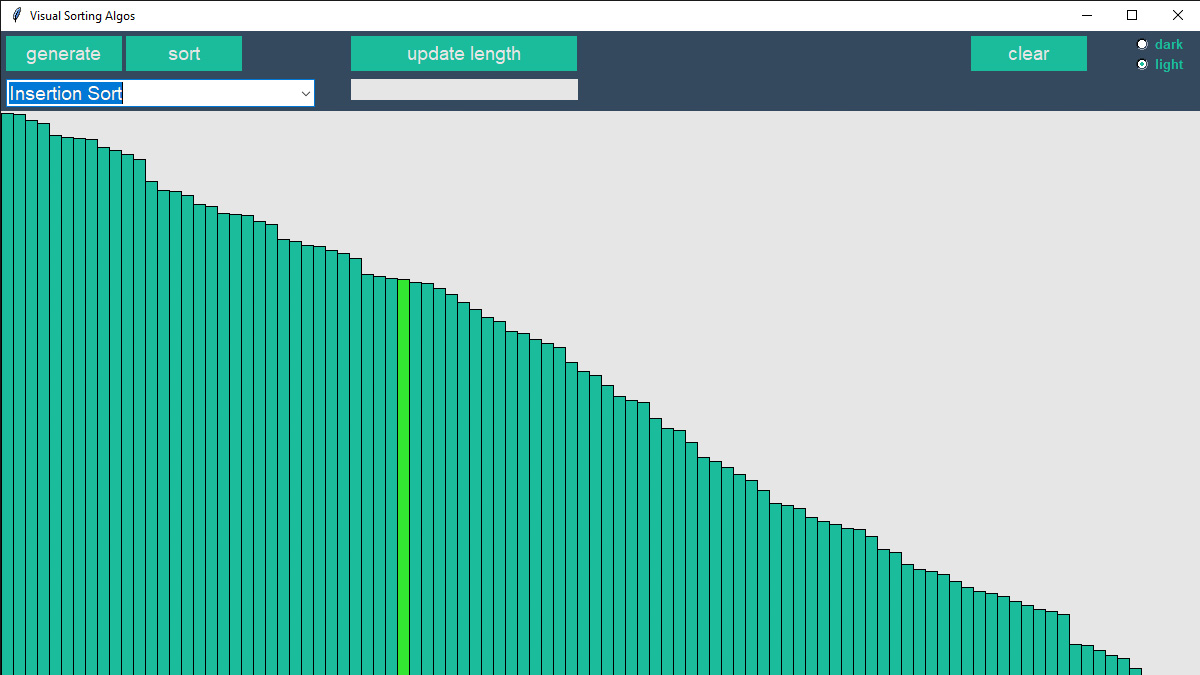
Skills: Python, Algorithms
Developed a visulation for sorting algorithms using tkinter and python. The visualization contains algorithms such as Selection Sort, Bubble Sort, Insertion Sort, Merge Sort and Quick Sort
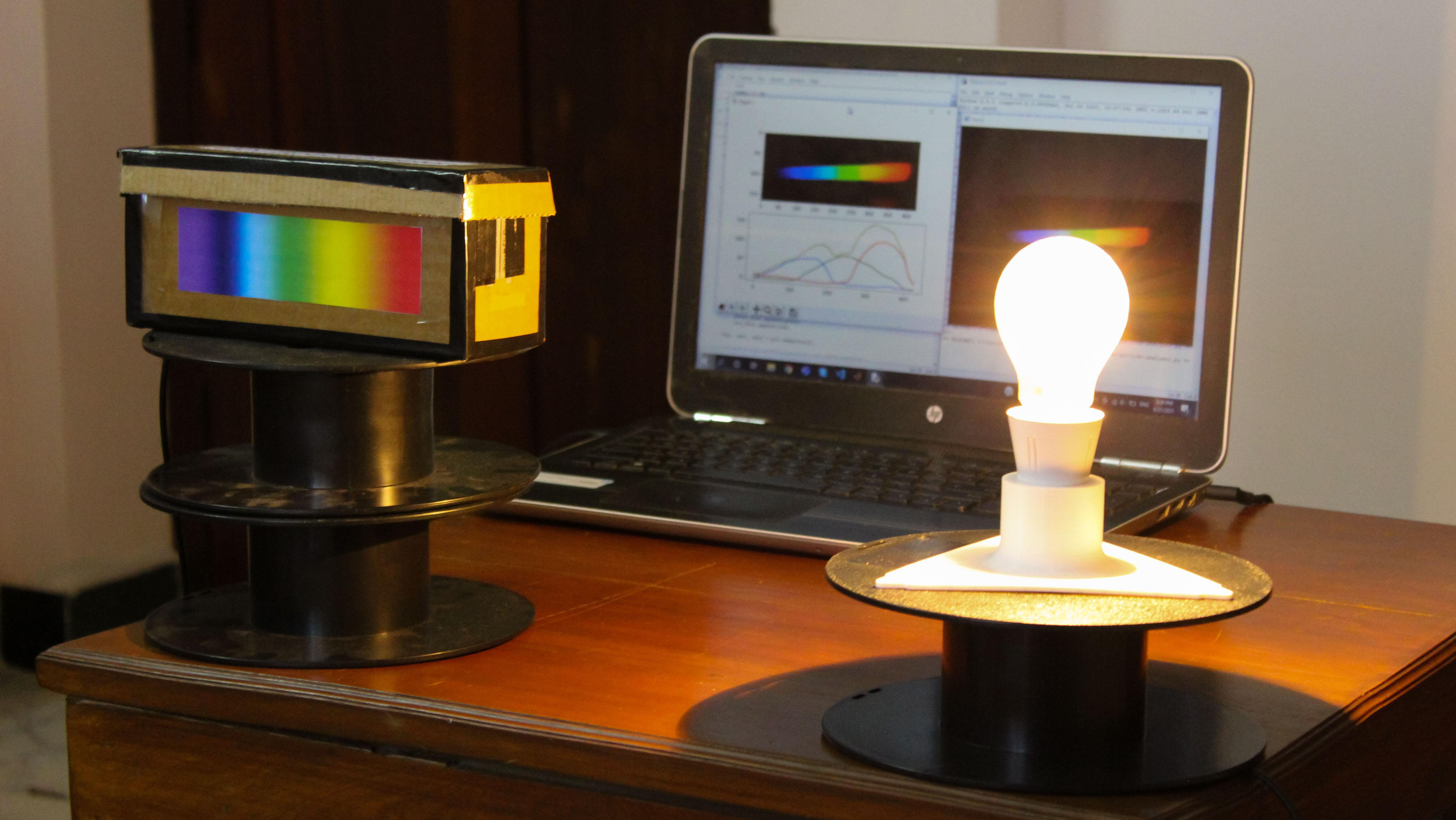
Skills: Image Processing, Spectroscopy
Built a low cost spectrometer out of household materials and used a webcam to capture the sensor data. The data was processed through image processing techniques to study the electromagnetic spectra of the oncoming light

Skills: Internet of Things, Arduino
Developed a system for monitoring garbage levels in garbage bins and determining the most efficient path for the garbage collection truck

I'm Kousheek, and I am currently a Robotics Researcher at the SMART Mechatronics and Robotics Group in Enschede, Netherlands. My research is primarily focused on the intersection of optimal control, reinforecement learning and aerial robotics. I recently graduated from a joint Master's in Robotics and Autonomous Systems from Ecole Polytechnique Universitaire de Lille and Ecole Centrale de Lille with highest honours (Mention Très Bien). Before this I completed a Dual Bachelor's Degree in Mathematics and Computer Science from Sri Aurobindo International Centre of Education. Apart from my professional/academic life, I am an FPV Drone Enthusiast and I enjoy reading, travelling and playing table tennis.
In my free time, I'm learning about vision-language-action models (such as GROOT-N1, pi0, etc), as well as other "embodied AI" frameworks, and exploring how these can be used for perception, decision-making, and coordination for swarm aerial robotics in physical interaction tasks. If these topics interest you, I'd love to have a chat!
You can contact me by email at kousheekc@gmail.com or send me a message on LinkedIn.